The Temboo service has moved away from Arduino support. The service access in this older guide will no longer work.

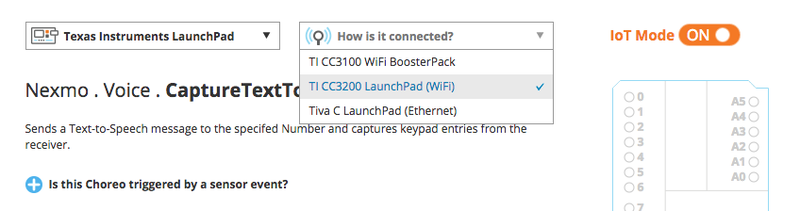
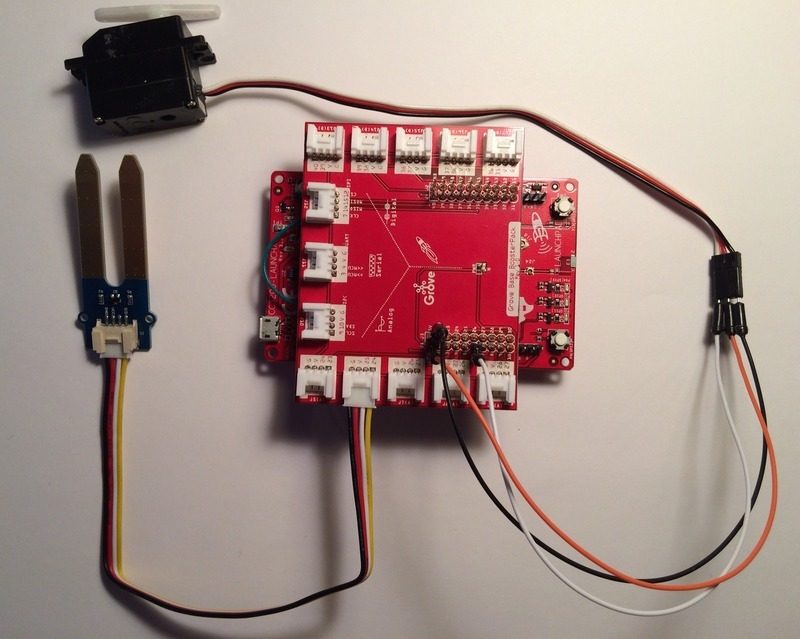
In this guide, you’ll build a device that interacts with the Nexmo API to give you remote control over when a plant gets watered. We’ll use a TI CC3200 LaunchPad and Seeed Grove Base BoosterPack to detect moisture and turn on the water, and Temboo’s new Conditions feature to connect the hardware to the Nexmo API.