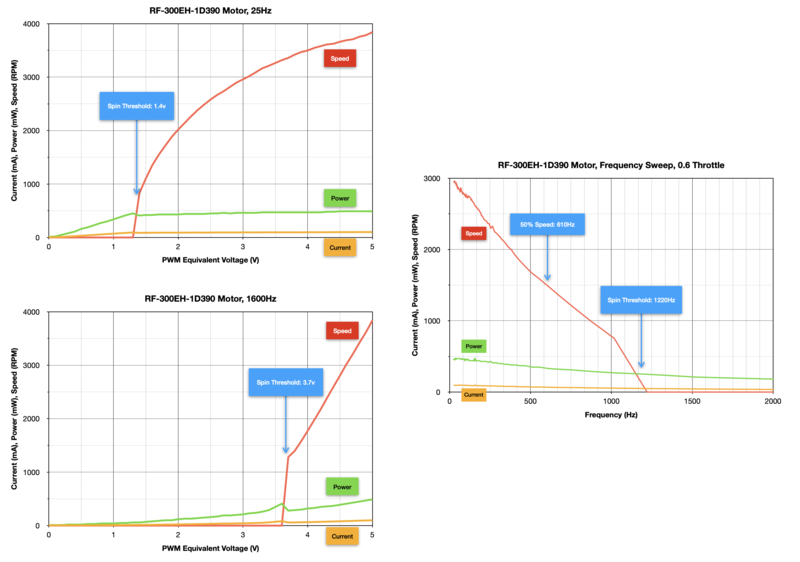
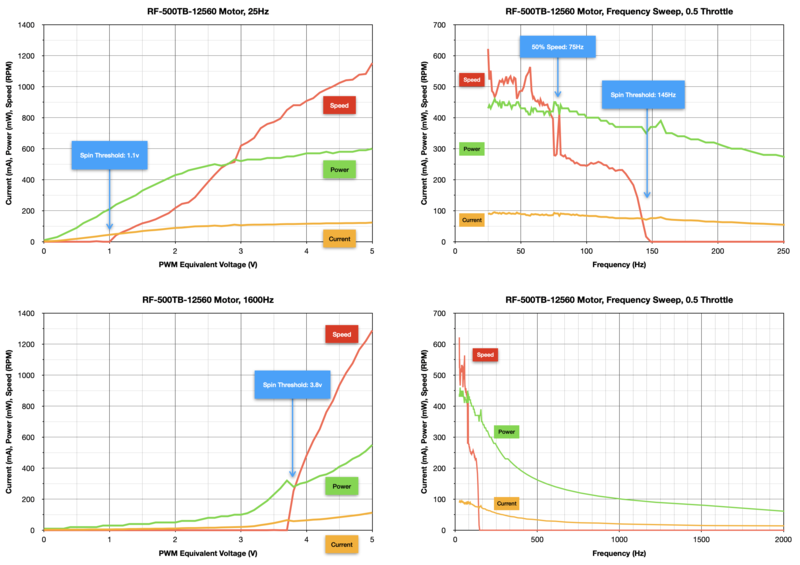
A lower PWM frequency can dramatically improve the slow-speed operation of brushed DC motors. Set your motor controller's PWM frequency below 100Hz and test to see if performance improves.

Jump to the Code Examples section to see how it's done.
Works with:
- CRICKIT FeatherWing
- CRICKIT for Circuit Playground Express
- DC Motor + Stepper FeatherWing
- Motor/Stepper/Servo Shield
- DRV8871 DC Motor Driver Breakout
- DRV8833 DC/Stepper Motor Driver Breakout
- TB6612 1.2A DC/Stepper Motor Driver Breakout
- L9110H H-Bridge Motor Driver
- L293D Dual H-Bridge Motor Driver
Supporting code libraries:

A Feather board without ambition is a Feather board without FeatherWings! This is the Fully assembled (with headers) DC Motor + Stepper FeatherWing which will let...
$21.50
In Stock
The original Adafruit Motorshield kit is one of our most beloved kits, which is why we decided to make something even better. We have upgraded the shield kit to make the bestest,...
Out of Stock

Sometimes we wonder if robotics engineers ever watch movies. If they did, they'd know that making robots into servants always ends up in a robot rebellion. Why even go down that...
Out of Stock

Sometimes we wonder if robotics engineers ever watch movies. If they did, they'd know that making robots into servants always ends up in a robot rebellion. Why even go down that...
Out of Stock

Spin two DC motors or step one bi-polar or uni-polar stepper with up to 1.2A per channel using the DRV8833. This motor driver chip is a nice alternative to the TB6612 driver. Like that...
$5.95
In Stock

Crank up your robotics with powerful Adafruit DRV8871 motor driver breakout board. This motor driver has a lot of great specs that make it useful for a wide variety of...
$7.50
In Stock

Spin two DC motors, step one bi-polar or uni-polar stepper, or fire off two solenoids with 1.2A per channel using the TB6612. These are perhaps better known as "
$6.95
In Stock

Run four solenoids, two DC motors, or one bi-polar or uni-polar stepper with up to 600mA per channel using the L293D. These are perhaps better known as "the drivers in our...
$8.95
In Stock

Run two solenoids or a single DC motor with up to 800mA per channel using the super-simple L9110H H-bridge driver. This bridge chip is an 8 DIP package so it's easy to fit onto any...
$1.50
In Stock