You've gone through the Welcome to CircuitPython guide. You've already gotten everything setup, and you've gotten CircuitPython running. Great! Now what? CircuitPython Essentials!
There are a number of core modules built into CircuitPython and commonly used libraries available. This guide will introduce you to these and show you an example of how to use each one.
Each section will present you with a piece of code designed to work with different boards, and explain how to use the code with each board. These examples work with any board designed for CircuitPython, including Circuit Playground Express, Trinket M0, Gemma M0, QT Py, ItsyBitsy M0 Express, ItsyBitsy M4 Express, Feather M0 Express, Feather M4 Express, Metro M4 Express, Metro M0 Express, Trellis M4 Express, and Grand Central M4 Express.
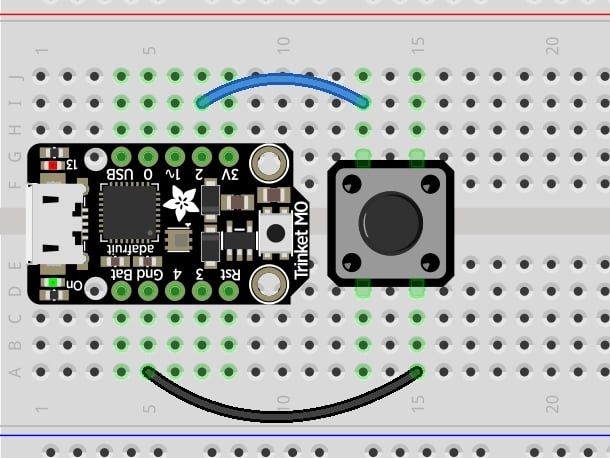
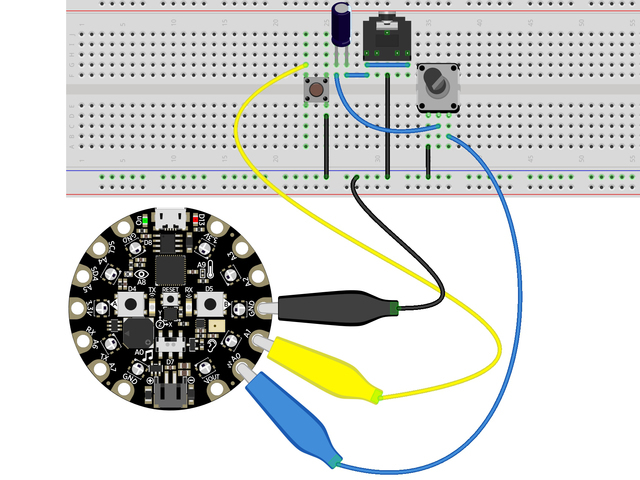
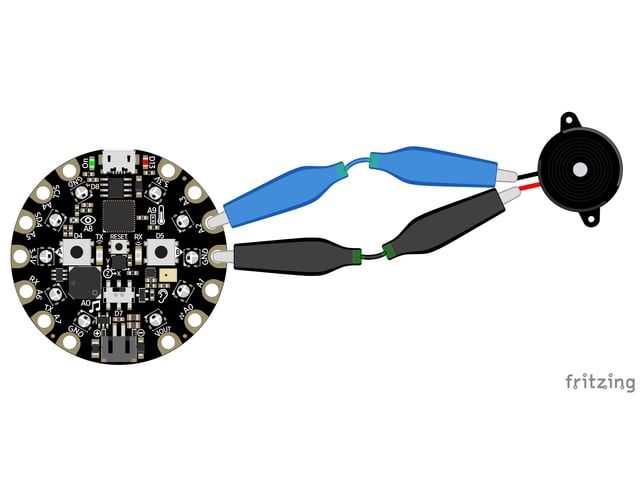
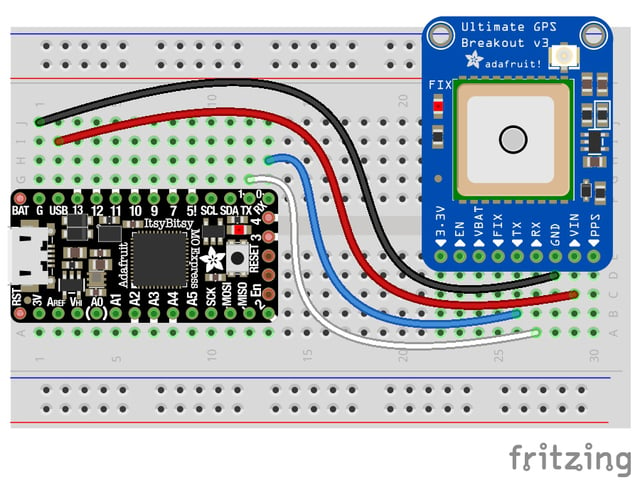
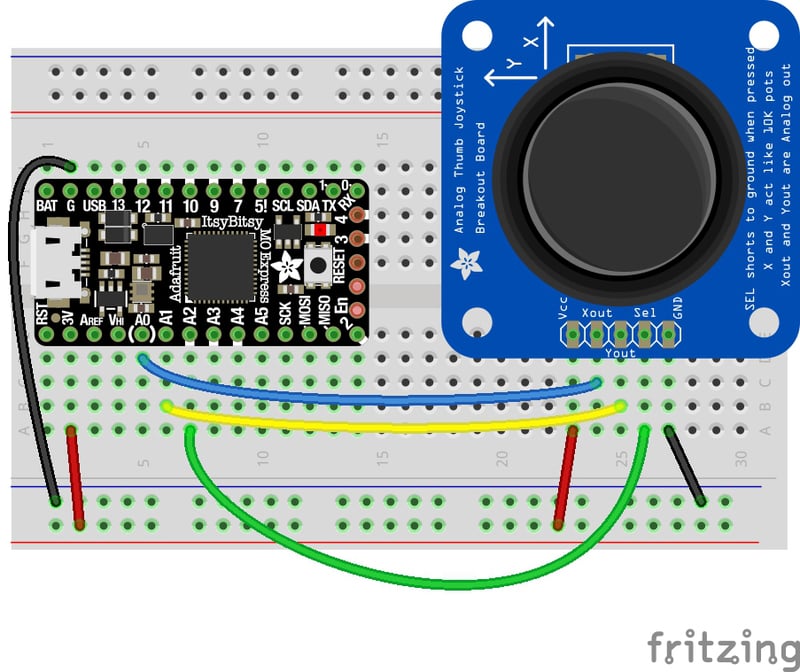
Some examples require external components, such as switches or sensors. You'll find wiring diagrams where applicable to show you how to wire up the necessary components to work with each example.
Let's get started learning the CircuitPython Essentials!