The VL6180X is a Time of Flight distance sensor like no other you've used! The sensor contains a very tiny invisible laser source, and a matching sensor. The VL6180X can detect the "time of flight", or how long the light has taken to bounce back to the sensor. Since it uses a very narrow light source, it is good for determining distance of only the surface directly in front of it. Unlike sonars that bounce ultrasonic waves, the 'cone' of sensing is very narrow. Unlike IR distance sensors that try to measure the amount of light bounced, the VL6180X is much more precise and doesn't have linearity problems or 'double imaging' where you can't tell if an object is very far or very close.

As if that weren't enough, we've also added SparkFun qwiic compatible STEMMA QT connectors for the I2C bus so you don't even need to solder. Just wire up to your favorite micro with a plug-and-play cable to get 6-DoF data ASAP. For a no-solder experience, just wire up to your favorite micro, like the STM32F405 Feather using a STEMMA QT adapter cable. The Stemma QT connectors also mean the VL6180 can be used with our various associated accessories.

This is the 'little sister' of the VL53L0X ToF sensor, and can handle about 5mm to 200mm of range distance. It also includes a lux sensor. If you need a larger range, check out the VL53L0X which can measure 50 - 1200 mm.

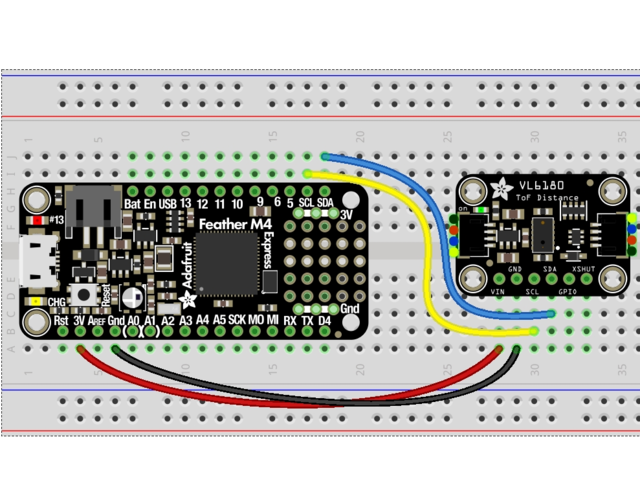
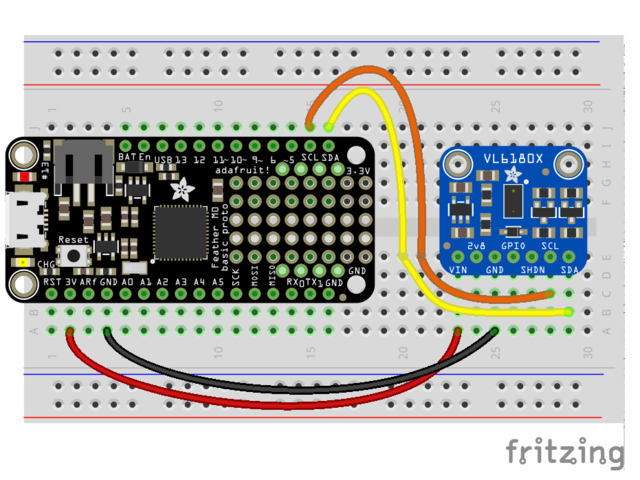
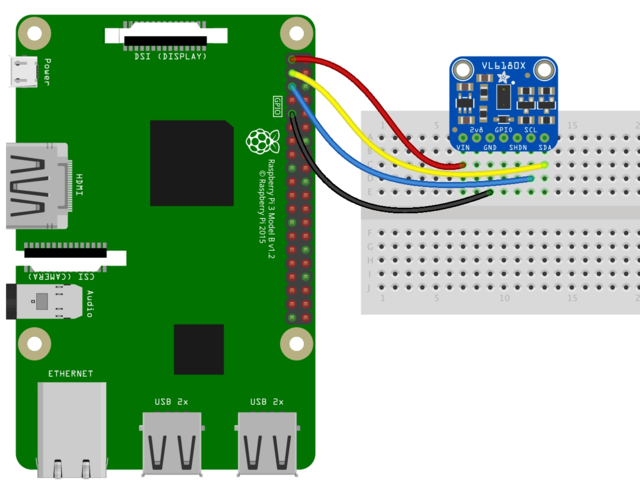
The sensor is small and easy to use in any robotics or interactive project. Since it needs 2.8V power and logic we put the little fellow on a breakout board with a regulator and level shifting. You can use it with any 3-5V power or logic microcontroller with no worries. Each order comes with a small piece of header. Solder the header onto your breakout board with your iron and some solder and wire it up for instant distance-sensing-success!

Communicating to the sensor is done over I2C with some simple commands. Most of the work is handled inside the sensor itself, so its very easy to port our Arduino library to another microcontroller.